Hemos conseguido hasta ahora pequeños e importantes pasos para llegar a nuestro reto final: reconocer emociones y recibir algún tipo de ayuda a través de las señales luminosas de la pantalla de ledes; utilizar el poder de la música para ayudar a los demás ; lograr con nuestra pequeña placa robótica que nuestras compañeras y nuestros compañeros hablen con un volumen adecuado; conectartodas las tarjetas dentro del aula para enviar mensajes de texto, imágenes, sonidos, melodías...; y hasta mantener constante nuestra actitud positiva y mostrar una espléndida sonrisa a pesar del azar y de las posibles situaciones adversas.
Es sorprendente, ¿verdad?, pero ¿crees que falta algo?, ¿te gustaría que tu robot se moviera?
Vamos a aprender todo lo necesario para conseguir que nuestro robot se mueva gracias a un pequeño servomotor.
1. El motor de las emociones
Hemos conseguido que la placa micro:bit detecte sonidos, movimientos, estados de ánimo y dé distintas respuestas para ayudar a los demás; sin embargo, ¿cómo te imaginas tu robot: estático o en movimiento? Seguramente has imaginado que se desplaza, se acerca o aleja de ti, mueve un brazo u otra parte...
¿Cómo crees que conseguiremos que nuestro robot se mueva?
Mi motor
¿Te atreves a explorar cómo funciona este motor tan extraño?
Observa y manipula con cuidado el pequeñomotor que te va a proporcionar tu profesora o profesor. Contesta junto a tus compañeras y compañeros a la siguientes preguntas:
¿Habías visto alguna vez este tipode motor?
¿Para qué crees que servirán esa especie de hélices que lo acompañan?
¿Cómo crees que se moverá?, ¿a qué velocidad?
¿Te has fijado que el cable que sale de él tiene tres colores?, ¿para qué crees que pueden servir?
¿Cómo crees que seconectará a la placa?
¿Quécomponentes piensas que se necesitará para ello?
Seguramente has llegado a la conclusión de que te hacen falta cables. Coge el kit que te va a proporcionar tu profesor o profesora e intenta hacer las conexiones necesarias.
Placa de expansión
¿Tienes una placa de expansión?
Observa las partes que tiene la placa de expansión:
¿Crees que habrá que conectarla a la Micro:bit?, En caso afirmativo, ¿por dónde crees que se conectará? Coméntalo con tu grupo y tu profe.
¿Te has fijado en la cantidad de pinchitos que tiene?, ¿y en el color? ¿Para qué crees que serán?
Fíjate que están agrupados de tres en tres: amarillo, rojo, negro; amarillo, rojo, negro..., ¿crees que podría tener algún tipo de relación con los colores del cable de tu motor servo? Sin conectar a la corriente tu placa de expansión, ¿cómo conectarías tu motor servo a la placa? Muéstrale cómo lo harías a tus compañeros y después a tu profe.
Por último, y súper importante ¿te has fijado que casi en cada objeto que está conectado a la placa, tiene un nombre escrito, unas letras y unos números? ¿Para qué crees que serán?, ¿sabrías identificar y explicarlo a tus compañeras y compañeros?
Ponle un poco de energía
¿Pero cómo le doy energía para que esto funcione?, ¿crees que necesitará conexión con alguna fuente de energía externa, como cuando conectas cualquier aparato eléctrico para que funcione? Si has contestado que sí, ¿serías capaz de localizar por dónde le suministraremos la corriente?
Efectivamente para que todo funcione necesitarás suministrar energía y para eso te daré dos pistas:
Prueba a ver si puedes conectarla con tu cable miniUSB de la micro:bit, ¿encuentras algún espacio para poder alimentar la placa con ese cable? Prueba a conectar todo a ver qué ocurre.
¿Sabes cuáles son las pilas de 9v? Si no las conoces, busca por internet e intenta encontrar algún tipo de accesorio para conectar ese tipo de pilas a la placa de expansión.
¿Puedo cargar el programa en la micro:bit desde la toma miniUSB de la placa? Prueba a ver qué sucede.
Programación
Makecode, el entorno de programación de micro:bit tiene extensiones que amplían las posibilidades de conectar y programar distintos aparatos especiales a nuestra micro:bit
Abre un nuevo proyecto en micro:bit y busca en las categorías la palabra extensiones. Se desplegarán muchas opciones, de entre todas ellas elige "servo":
La extensión que nos interesa es la que está rodeada en rojo: servomotor. Sigue los siguientes pasos:
Ahora, verás en la zona de los bloques del entorno de programación de Makecode una nueva categoría de bloques llamada Servos.
Seguro que ya sabías que con Makecode contamos con un simulador, ¿verdad?, pues..., muy bien, es el momento de que pruebes esos bloques y veas cómo el simulador realiza todo lo que vayas programando. Por ejemplo:
a) Intenta hacer que el motor se mueva por siempre de un lado al otro como si fuera un parabrisas de un coche. Por cierto, coloca si no los tiene, alguno de los accesorios que trae el motor que parecen aspas de molino.
b) Intenta hacer que pulsando el botón A se coloque a 0º y con el botón B a 180º.
c) Espera, espera..., ¿esto no da la vuelta completa?, pues ¡vaya chufa de motor! - Esperaaa..., piensa un poco ¿para qué crees que pueden servir este tipo de motores?, ¿dónde los has podido ver funcionando?
Lumen dice ¿Necesitas ayuda con el simulador?
Así tendrías que ver el simulador:
Motus dice ¿Te has sentido confiado en esta actividad?
Cuando tenemos que hacer alguna actividad podemos tener dudas sobre si seremos capaces de hacerlo.
Para poder vencer a estos miedos en las nuevas actividades que tengas que hacer sigue estos consejos:
Hay cosas que haces muy bien. Úsalas para hacer la actividad.
Hay cosas que te cuestan un poco hacerlas. Inténtalo y cree en ti mismo o en ti misma. Seguro que te sorprende lo que puedes conseguir.
Hay cosas que son muy difíciles. Fíjate en algún ejemplo, pregunta a tu compañero o compañera. Pide ayuda a tu profe.
¡Lo harás genial!
2. Aprende a conectarme
Los servomotores son dispositivos muy utilizados en robótica, como en humanoides, brazos, control de puertas...
Un motor servo, a diferencia de otro tipo de motores, se puede controlar y es capaz de situarse en cualquier posición desde 0 a 180 grados, como si se moviese sobre un semicírculo.
En las siguientes pestañas aprenderás cómo conectarlo y cómo programarlo:
Conectamos
El servo cuenta con tres cables, dos son para alimentación y el tercero es para una señal de control.
Podemos utilizar cables cocodrilo para conectar el servo a la micro:bit.
En la zona inferior de la micro:bit hay 25 tiras doradas, llamadas pines. Estos pines permiten crear circuitos y conectar elementos externos como timbres, motores, etc. Es lo que necesitamos para conectar el servomotor.
Los pines más utilizados son los que tienen las tiras más anchas, como puedes ver en la imagen de la derecha.
Los primeros tres pines, 0 , 1 y 2 , se pueden usar para muchas cosas diferentes, utilizándose como entradas y salidas. También pueden funcionar como botones táctiles.
El pin 3V sirve como salida o entrada de 3 voltios de potencia.
El pin GND se utiliza de conexión a tierra para cerrar un circuito.
Normalmente se conecta desde Pin0, 3V y GND y se controla enviando la señal en Pin0.
Casi siempre el color del cableado es naranja = señal, rojo = 3V, marrón = tierra (GND).
Programamos
Para programar nuestro servomotor seguiremos los siguientes pasos:
1. Abrir un nuevo proyecto. Nombrarlo y seleccionar idioma.
2. Hacer clic en extensiones y seleccionar la de servo.
3. Tendremos acceso a los bloques de esta categoría:
1. Set servo angle: Con este bloque podremos mover el ángulo a un valor deseado.
2. Continuous servo: Podremos controlar la velocidad de rotación continua siempre que el servo cuente con esta característica.
3. Stop servo: Detiene el motor servo e impide que éste siga girando.
4. Set servo stop on neutral: Nos ayudará a limitar la rotación del servo cuando éste llegue a 90 grados.
5. Set servo range: Este bloque nos permite indicar el rango de rotación del servo, es decir: del valor mínimo al máximo expresado en grados.
6. Set servo pulse to: Nos permitirá usar distintos tipos de motores y con anchos de pulsos diferentes.
Vídeo
En el siguiente vídeo puedes aprender cómo conectar un servomotor a la micro:bit y cómo programarlo:
Recuerda que puedes activar los subtítulos del video.
Lectura facilitada
Los servomotores son dispositivos
muy utilizados en robótica.
Los servomotores se usan como:
-Humanoides.
-Brazos.
-Control de puertas.
-Y muchos más.
El servomotor se controla.
Un servomotor se coloca en cualquier posición.
Se mueve en semicírculo.
La posición va desde 0 a 180 grados.
Conecta el servomotor
El servomotor tiene tres cables:
- Dos cables de alimentación.
- Un cable para una señal de control.
Usa cables cocodrilo
para conectar el servo a la micro:bit.
Los pines sirven para crear circuitos
y conectar elementos externos.
tor.Los elementos externos pueden ser
- Timbres.
- Motores.
- Y muchos más.
Los pines están en la parte inferior de la micro:bit.
Son 25 tiras doradas.
Necesitas los pines para conectar el
el servomotor a la placa micro:bit.
Tú usas más los pines de tira ancha.
Los primeros tres pines son 0, 1 y 2.
Tú usas los pines para muchas cosas diferentes.
Los pines se usan para:
- Entradas.
- Salidas.
- Botones táctiles.
- Y muchas cosas más.
El pin 3V sirve de salida o entrada
de 3 voltios de potencia.
El pin Ground sirve de conexión a tierra
para cerrar un circuito.
Tú conectas desde Pin0, 3V y GND y controlas.
Para controlar envía la señal en Pin0.
El color del cable es:
- Naranja es de señal.
- Rojo es 3 voltios.
- Marrón es de tierra
y se llama GND.
GND son las siglas de Ground.
Programas el servomotor
Sigue estos pasos
para programar el servomotor:
1. Abrir un nuevo proyecto.
Nombrar el proyecto y seleccionar idioma.
2. Hacer clic en extensiones
y seleccionar la extensión de servo.
3. Acceder a los bloques
de esta categoría:
1. Set servo angle:
Mueves el ángulo a un valor deseado.
2. Continuous servo:
Controlas la velocidad
de rotación continua.
3. Stop servo:
Detienes el motor servo
e impide que el motor gire.
4. Set servo stop on neutral:
Limitas la rotación del servo
cuando el servo llegue a 90 grados.
5. Set servo range:
Indicas el rango de rotación del servo.
El rango de rotación es
el rango del valor mínimo al máximo
expresado en grados.
6. Set servo pulse to:
Usas distintos tipos de motores
y con anchos de pulsos diferentes.
Vídeo
El vídeo explica la conexión
de un servomotor a la micro:bit
También explica la programación
de un servomotor.
Lumen dice ¿...Y si no tengo placa de expansión?
Como para casi todo en la vida, existen diferentes formas de conseguir una misma cosa; en Computación y Robótica, cuando esto ocurre, casi siempre tenemos diferentes caminos que nos llevan al mismo sitio.
Mira el siguiente video en el que te explican cómo conectar el motor servo a la micro:bit sin necesidad de tener una placa de expansión. Eso sí, te harán falta cables de cocodrilo tipo Makey Makey, también los verás en el vídeo.
Recuerda que puedes activar los subtítulos si lo necesitas.
Los pines están en la parte inferior de la micro:bit.
Son 25 tiras doradas.
Necesitas los pines para conectar el
el servomotor a la placa micro:bit.
Tú usas más los pines de tira ancha.
Los primeros tres pines son 0, 1 y 2.
Tú usas los pines para muchas cosas diferentes.
Los pines se usan para:
- Entradas.
- Salidas.
- Botones táctiles.
- Y muchas cosas más.
El pin 3V sirve de salida o entrada
de 3 voltios de potencia.
El pin Ground sirve de conexión a tierra
para cerrar un circuito.
Tú conectas desde Pin0, 3V y GND y controlas.
Para controlar envía la señal en Pin0.
El color del cable es:
- Naranja es de señal.
- Rojo es 3 voltios.
- Marrón es de tierra
y se llama GND.
GND son las siglas de Ground.
Programas el servomotor
Sigue estos pasos
para programar el servomotor:
1. Abrir un nuevo proyecto.
Nombrar el proyecto y seleccionar idioma.
2. Hacer clic en extensiones
y seleccionar la extensión de servo.
3. Acceder a los bloques
de esta categoría:
1. Set servo angle:
Mueves el ángulo a un valor deseado.
2. Continuous servo:
Controlas la velocidad
de rotación continua.
3. Stop servo:
Detienes el motor servo
e impide que el motor gire.
4. Set servo stop on neutral:
Limitas la rotación del servo
cuando el servo llegue a 90 grados.
5. Set servo range:
Indicas el rango de rotación del servo.
El rango de rotación es
el rango del valor mínimo al máximo
expresado en grados.
6. Set servo pulse to:
Usas distintos tipos de motores
y con anchos de pulsos diferentes.
Vídeo
El vídeo explica la conexión
de un servomotor a la micro:bit
También explica la programación
de un servomotor.
Definición:
Es la ciencia que se ocupa del diseño y construcción de los robots.
Ejemplo:
La robótica está evolucionando mucho en los últimos años.
3. ¿Cómo me muevo?
Lee y completa, eligiendo para cada instrucción el bloque adecuado para ejecutarla. Si lo necesitas, repasa antes el apartado anterior, en la pestaña "Programamos", para recordar la función de cada bloque.
4. Me mueve ayudarte
Hemos aprendido a utilizar un motor servo para controlar el movimiento de nuestro robot. El movimiento es algo importante para cualquier robot. Aunque los robots que encontramos en el mercado pueden realizar movimientos muy diferentes y complejos, hemos podido ver cómo con un pequeño servo, nuestra placa robótica, algunos cables y el programa adecuado podemos conseguir movimientos sencillos pero que van a contribuir a que nuestro robot sea un éxito.
En las opciones que tienes a continuación hay ejercicios para que practiques y te inicies con esta nueva herramienta. Realiza aquellas en las que te sientas más cómoda o cómodo.
Opción A: ¡Ayúdame a girar!
Realiza un programa en el que el servo gire 90 grados cuando presionemos el botón A.
¿Cuál de estos bloques tienes que encajar dentro del evento Al presionarse el botón A:
Opción B: Controla el movimiento
Realiza un programa en el que el servo se posicione a 0 grados cuando presionemos el botón A y gire hacia la posición de 180 grados cuando presionemos el botón B.
No olvides comprobar el programa en el simulador antes de descargarlo.
Opción C: Me acerco cuando sonríes
Elabora un programa en el que asocies una emoción a un movimiento, por ejemplo:
Cuando pulses el botón A y se muestre una sonrisa en la pantalla de ledes se produzca un giro en el servomotor. Imagina cuál puede ser ese movimiento en tu robot: movimiento de un brazo, de una pierna, del cuello, de una ceja... En función del movimiento que hayas imaginado necesitarás hacer otro giro en sentido contrario, repetir varias veces el movimiento, etc.
Cuando pulses el botón B se muestre una mueca de tristeza y cambie el sentido del movimiento o se pare.
Opción D: Me gusta moverme
Elige uno de los programas que hayas realizado en los apartados 5.1, 5.2, 5.3 o 5.4. Ábrelo y complícalo un poco con movimientos del robot.
Te doy algunas ideas:
Distintos movimientos al pulsar distintos botones.
Movimientos después de una animación
Movimiento cuando suene una melodía y parar cuando se termine.
Repetir un movimiento cuando se cumpla una condición.
Realizar un movimiento diferente con cada emoción que salga al azar en el dado de las emociones.
 Hemos conseguido hasta ahora pequeños e importantes pasos para llegar a nuestro reto final: reconocer emociones y recibir algún tipo de ayuda a través de las señales luminosas de la pantalla de ledes; utilizar el poder de la música para ayudar a los demás ; lograr con nuestra pequeña placa robótica que nuestras compañeras y nuestros compañeros hablen con un volumen adecuado; conectar todas las tarjetas dentro del aula para enviar mensajes de texto, imágenes, sonidos, melodías...; y hasta mantener constante nuestra actitud positiva y mostrar una espléndida sonrisa a pesar del azar y de las posibles situaciones adversas.
Hemos conseguido hasta ahora pequeños e importantes pasos para llegar a nuestro reto final: reconocer emociones y recibir algún tipo de ayuda a través de las señales luminosas de la pantalla de ledes; utilizar el poder de la música para ayudar a los demás ; lograr con nuestra pequeña placa robótica que nuestras compañeras y nuestros compañeros hablen con un volumen adecuado; conectar todas las tarjetas dentro del aula para enviar mensajes de texto, imágenes, sonidos, melodías...; y hasta mantener constante nuestra actitud positiva y mostrar una espléndida sonrisa a pesar del azar y de las posibles situaciones adversas. Observa y manipula con cuidado el pequeño motor que te va a proporcionar tu profesora o profesor. Contesta junto a tus compañeras y compañeros a la siguientes preguntas:
Observa y manipula con cuidado el pequeño motor que te va a proporcionar tu profesora o profesor. Contesta junto a tus compañeras y compañeros a la siguientes preguntas: Observa las partes que tiene la placa de expansión:
Observa las partes que tiene la placa de expansión: ¿Pero cómo le doy energía para que esto funcione?, ¿crees que necesitará conexión con alguna fuente de energía externa, como cuando conectas cualquier aparato eléctrico para que funcione? Si has contestado que sí, ¿serías capaz de localizar por dónde le suministraremos la corriente?
¿Pero cómo le doy energía para que esto funcione?, ¿crees que necesitará conexión con alguna fuente de energía externa, como cuando conectas cualquier aparato eléctrico para que funcione? Si has contestado que sí, ¿serías capaz de localizar por dónde le suministraremos la corriente?

 El servo cuenta con tres cables, dos son para alimentación y el tercero es para una señal de control.
El servo cuenta con tres cables, dos son para alimentación y el tercero es para una señal de control.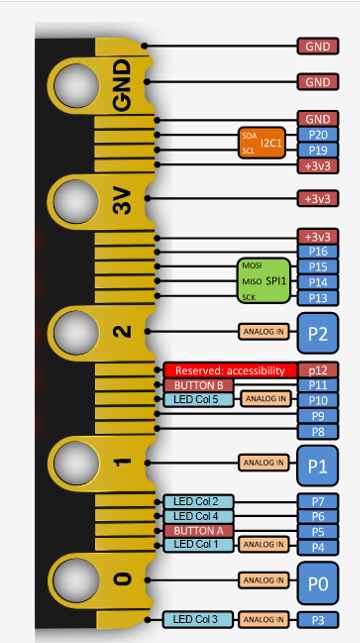
 1. Set servo angle: Con este bloque podremos mover el ángulo a un valor deseado.
1. Set servo angle: Con este bloque podremos mover el ángulo a un valor deseado.

 Definición:
Definición: